
本期專訪|陳金聖特聘教授:溫度讓自動化科技更貼近生活
本期專訪|陳金聖特聘教授:溫度讓自動化科技更貼近生活
產學處 吳易軒專員/採訪報導
關鍵字:智慧自動化、機器人控制、運動控制、機器視覺
 |
自動化科技研究所陳金聖特聘教授學歷: 國立交通大學機械工程博士 經歷: 念毅股份有限公司共同創辦人 東捷科技股份有限公司研發經理 東元電機股份有限公司研發經理 |
隨著人力作業的成本不斷提升、人員流動率高、標準不易建立等因素,人工作業面臨瓶頸,在這樣的背景下,加上工廠自動化的建置成本逐漸降低,幾乎與人頭數成本相差無幾,各企業無不逐漸走向在地生產自動化。本校陳金聖教授在智慧自動化相關領域研究多年,主要研究內容可分為兩大主題:機器人控制與機器視覺,以下將針對此兩大主題予以介紹。
機器人控制
陳金聖教授實驗室之機器人控制相關研究包括: EtherCAT多軸控制器技術、多軸機械手臂、避障路徑規劃、機械手臂虛實整合平台等。應用案例包括與東元集團(東元電機綜合研究所)合作之服務型機器人,在東元旗下餐飲業提供點餐、送餐等互動,目前開發之餐飲服務機器人並銷售至日本摩斯漢堡,陳金聖教授提到,目前在服務業的機器人未必能真正節省人力成本,但卻大大提升話題性及趣味性,為店家吸引更多人潮並提升銷售。
另外,在機械手臂的部分,為了避免寫程式的高門檻,實驗室開發直覺式教導,只需為機器人示範動作,透過機器學習,機械手臂便能習得該動作的邏輯並且自主運作。

圖一、東元集團餐飲服務機器人
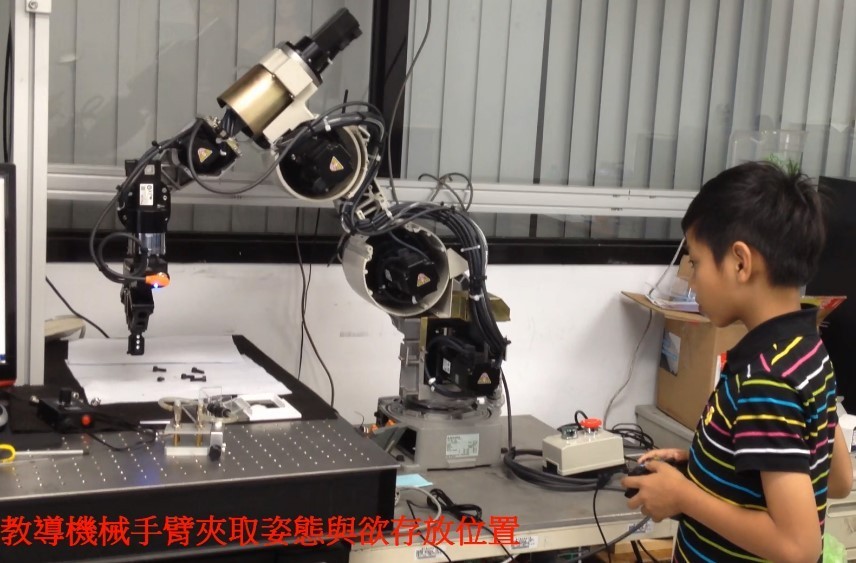
圖二、直覺式機器手臂教導
機器視覺
機器視覺在工業應用有GIGI等4大應用,意即Guide(引導定位)、Inspection(檢測)、Gauge(量測)、Identification(識別),以產線動作為例,產線上的機器手臂必須透過機器視覺快速找出產品位置,使其可以精準的取放物件。
另外機器視覺也可以協助進行產品瑕疵檢測,尺寸、角度的量測,最後再以條碼或文字掃讀,使所有產品都可進行追溯,進一步建立產品履歷制度。陳金聖教授實驗室便以Identification(識別)應用,開發出調酒機器人,讓你不用去酒吧人擠人,就可以請機器人為你調配出血腥瑪莉。
除此之外,3D機器視覺技術也是目前越來越重要的領域,3D機器視覺具備觀察物件、確認及建立全新工作參數的能力,在編程複雜且耗時的3D路徑時,3D視覺格外有效率,過去的機械手臂只能夾取「排排站好的零件」,如果是一大堆不規則形狀的東西放在盒子裡時就無法使用機械手臂夾取,必須改由人工輔助方式進行前處理。
透過3D視覺模組,機械手臂就能自動針對零件區做立體掃描,並判斷該使用何種角度才能正確夾起零件,大幅降低傳統機械手臂所需要的輔助人力。陳金聖教授便透過Kinect感測器,藉由紅外線的視差、深度陰影、IR點分光等現象,引導機械手臂取物,更精確也更具彈性。

圖三、Kintect仿真虛擬感測